ドローンの運用には安全な飛行計画が大切ですが、スタッフの服装も安全性の向上に関わります。
今回はドローンを飛ばす際の服装について、まとめてみます。
目次
- 服装に関する注意
- 状況によって必要となるモノ

スタッフブログ

ドローンの運用には安全な飛行計画が大切ですが、スタッフの服装も安全性の向上に関わります。
今回はドローンを飛ばす際の服装について、まとめてみます。

ドローンのルールとして代表的なものとして「航空法」があげられますが、他にも対象となる法律がいくつもあります。
「特定飛行じゃないから大丈夫」であっても、他の法律も問題ないかを自身で判断できないと、知らぬ間に違反を犯していた..なんてことになってしまう可能性があります。
航空法において特定飛行に当たらない、または飛行の許可・承認等を受けていても、小型無人機等飛行禁止法など他の法律に違反していればそれは違法です。
当記事では航空法以外のルールの1つとして、「小型無人機等飛行禁止法」の概要を解説します。
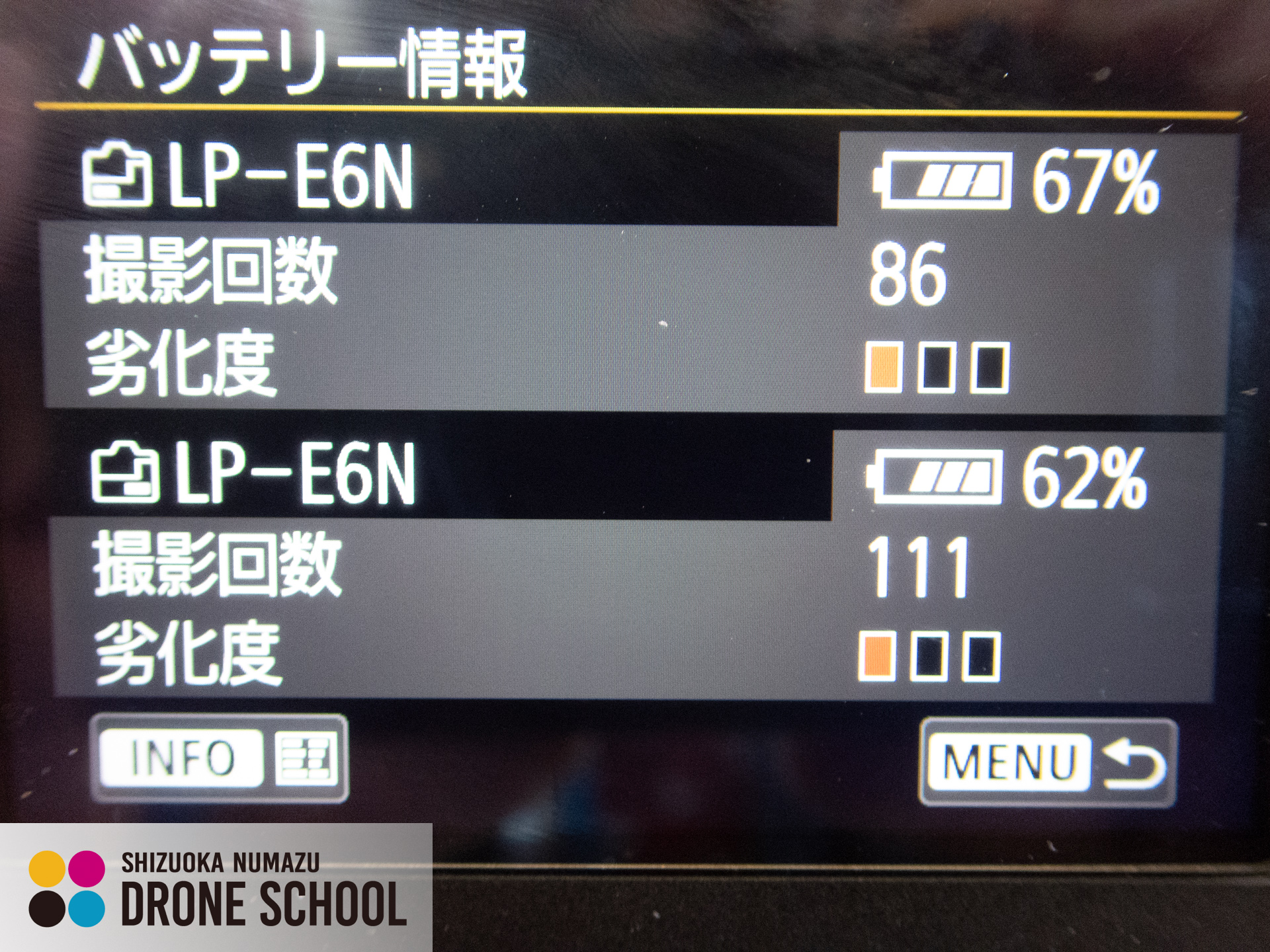
EOS 5DMark2の頃からカメラのバッテリーはLP-E6系を使用してきました。
現行はLP-E6NHというものになりますが、充電器が変わらず使えるのは助かっています。
使っているバッテリーのいくつかが大分劣化してきていたので、今回いくつかバッテリーを新調しました。
カメラのメニューから現在使用しているバッテリーの劣化度を確認できます。